Crean el pulpo robótico que revolucionará múltiples sectores industriales gracias a su manipulación delicada y precisa de objetos
'Robopulpo'
Un equipo británico ha diseñado un robot que se adherirá a las superficies, sentirá su entorno y controlará sus propias acciones
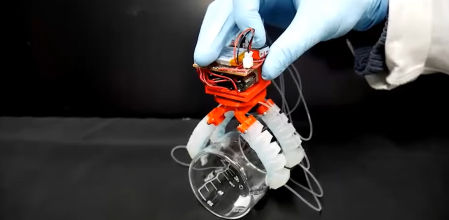
El pulpo robótico.

Un equipo de investigadores de la Universidad de Bristol ha diseñado un robot sencillo pero inteligente que usa flujos de aire o agua para coordinar acciones de succión y movimientos, tal como lo hacen los pulpos con sus ocho tentáculos y centenares de ventosas.
A través de un estudio publicado en la revista Science Robotics, han mostrado cómo este robot blando puede usar el flujo de succión no solo para adherirse a objetos, sino también para percibir su entorno y controlar sus propias acciones, imitando las acciones de un pulpo real. Un único sistema de succión permite al robot agarrar objetos delicados, detectar si tocan aire, agua o una superficie rugosa, e incluso predecir la fuerza con la que algo lo tira, todo a la vez, sin necesidad de un ordenador central.
El invento viene de un proyecto anterior, en el que los investigadores consiguieron una ventosa inteligente, que ahora ha evolucionado a una estructura más compleja en forma de robot blando.
La inteligencia de succión funciona a dos niveles: al acoplar el flujo de succión a los circuitos fluídicos locales, los robots blandos pueden lograr una inteligencia corporal de bajo nivel similar a la de un pulpo, incluyendo la sujeción suave de objetos delicados, la curvatura adaptativa y la encapsulación de objetos de geometrías desconocidas. Al decodificar la respuesta a la presión de una ventosa, los robots pueden lograr una percepción de alto nivel, que incluye la detección de contacto, la clasificación del entorno y la rugosidad de la superficie, así como la predicción de la fuerza de tracción interactiva.

Robopulpo
Múltiples aplicaciones prácticas
Este sistema de succión inteligente, sencillo y económico, podría dar lugar a una nueva generación de robots blandos más seguros, versátiles y energéticamente eficientes. Entre sus posibles usos se incluyen la recolección cuidadosa de fruta en la agricultura, la manipulación de artículos frágiles en fábricas, la aplicación de elementos médicos en el cuerpo humano o la creación de juguetes blandos y herramientas portátiles que puedan interactuar de forma segura con las personas.
El equipo trabaja actualmente para reducir el tamaño y la robustez del sistema para su uso en el mundo real. También pretenden combinarlo con materiales inteligentes e IA para mejorar su adaptabilidad y la toma de decisiones en entornos complejos.